아파치 에어플로우로 작업흐름 개발해보기
by Michal Karzynski
Michal Karzynski의 Get Started Developing Workflows with Apache Airflow을 번역했습니다.
Apache Airflow는 복잡한 계산을 요하는 작업흐름과 데이터 처리 파이프라인을 조율하기 위해 만든 오픈소스 도구이다. 길이가 긴 스크립트 실행을 cron으로 돌리거나 빅데이터 처리 배치 작업을 정기적으로 수행하려고 할 때 Airflow가 도움이 될 수 있다. 이 포스트는 Airflow를 이용하여 파이프라인을 구현해보려고 시도하는 이들을 위한 입문 튜토리얼이다.
Airflow 상의 작업흐름은 방향성 비순환 그래프(DAG)로 설계된다. 즉, 작업흐름을 짤 때 그것이 어떻게 독립적으로 실행 가능한 태스크들로 나뉠 수 있을까 생각해봐야 한다. 그다음에야 각 태스크를 그래프로 결합하여 전체적인 논리 흐름에 맞게 합칠 수 있다.
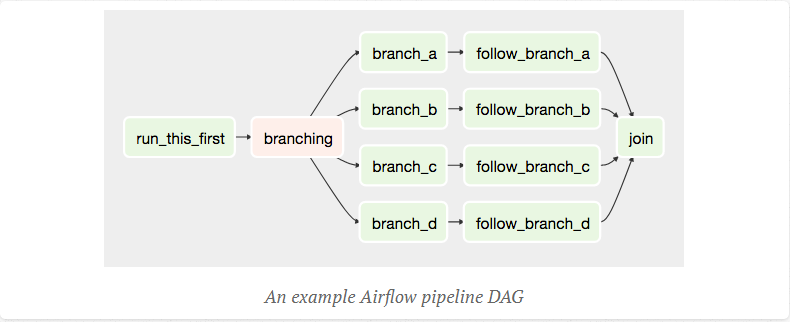
그래프 모양이 작업흐름의 전반적인 논리 구조를 결정한다. Airflow DAG는 여러 분기를 포함할 수 있고 작업흐름 실행 시 건너뛸 지점과 중단할 지점을 결정할 수 있다.
Airflow는 각 태스크에서 오류가 발생할 때마다 여러 번 재실행하기에 매우 회복성 높은 설계를 이끌어낸다. Airflow를 완전히 멈췄다가 미완료 태스크를 재시작하면서 실행 중이던 업무 흐름으로 되돌아갈 수 있다.
Airflow 오퍼레이터를 설계할 때 한 번 넘게 실행될 수 있음을 염두에 둬야 한다. 각 태스크는 멱등이어야한다. 즉, 의도하지 않은 결과를 발생시키지 않고 여러 번 수행될 수 있어야 한다.
Airflow 명명법
다음은 Airflow 업무 흐름을 설계할 때 사용하는 몇 가지 용어에 관한 간략한 개요이다.
-
Airflow DAG는 태스크로 구성된다.
-
각 태스크는 오퍼레이터 클래스를 인스턴스화하여 만든다. 구성한 오퍼레이터 인스턴스는 다음과 같이 태스크가 된다.
my_task = MyOperator(...) -
DAG가 시작되면 Airflow는 데이터베이스에 DAG 런 항목을 만든다.
-
특정 DAG 런 맥락에서 태스크를 실행하면 태스크 인스턴스가 만들어진다.
-
AIRFLOW_HOME은 DAG 정의 파일과 Airflow 플러그인을 저장하는 디렉터리이다.
| 언제? | DAG | 태스크 | 다른 태스크 관련 정보 |
|---|---|---|---|
| 정의했을 때 | DAG | 태스크 | get_flat_relatives |
| 실행했을 때 | DAG 런 | 태스크 인스턴스 | xcom_pull |
| 기본 클래스 | DAG | BaseOperator |
Airflow 문서는 여러 개념들에 대해 상세한 정보를 제공한다.
선행요건
Airflow는 파이썬으로 짜여있다. 컴퓨터에 파이썬이 이미 깔려있다고 가정하겠다. 참고로 난 파이썬 3을 사용하고 있다(지금이 2017년이기 때문이지, 이봐들 어서!). 그러나 Airflow는 파이썬 2도 지원한다. virtualenv 또한 깔려있다고 가정하겠다.
$ python3 --version
Python 3.6.0
$ virtualenv --version
15.1.0
Airflow 설치하기
본 튜토리얼을 위한 작업 공간 디렉터리를 만들고 그 안에 파이썬 3 virtualenv 디렉터리를 만들자.
$ cd /path/to/my/airflow/workspace
$ virtualenv -p `which python3` venv
$ source venv/bin/activate
(venv) $
이제 Airflow 1.8을 설치해보자.
(venv) $ pip install airflow==1.8.0
이제 DAG 정의 파일과 Airflow 플러그인이 저장되는 AIRFLOW_HOME 디렉터리를 만들어야 한다. 디렉터리가 만들어지면 AIRFLOW_HOME 환경 변수를 설정하자.
(venv) $ cd /path/to/my/airflow/workspace
(venv) $ mkdir airflow_home
(venv) $ export AIRFLOW_HOME=`pwd`/airflow_home
이제 Airflow 명령을 실행할 수 있다. 다음 명령어 실행을 시도해보자.
(venv) $ airflow version
____________ _____________
____ |__( )_________ __/__ /________ __
____ /| |_ /__ ___/_ /_ __ /_ __ \_ | /| / /
___ ___ | / _ / _ __/ _ / / /_/ /_ |/ |/ /
_/_/ |_/_/ /_/ /_/ /_/ \____/____/|__/
v1.8.0rc5+apache.incubating
airflow version 명령을 실행시키면 Airflow는 AIRFLOW_HOME에 기본 구성 파일 airflow.cfg를 만든다.
airflow_home
├── airflow.cfg
└── unittests.cfg
본 튜토리얼은 airflow.cfg에 저장된 환경설정 기본값을 사용한다. Airflow 설정을 조정하고 싶다면 해당 파일을 변경해라. Airflow 환경설정에 관한 자세한 내용은 문서를 참조해라.
Airflow DB 초기화하기
다음 단계는 Airflow SQLite 데이터베이스를 만들고 초기화하는 명령을 실행하는 것이다.
(venv) $ airflow initdb
데이터베이스는 기본적으로 airflow.db에 작성된다.
airflow_home
├── airflow.cfg
├── airflow.db <- Airflow SQLite DB
└── unittests.cfg
SQLite는 로컬 테스트와 개발 용도로 사용해도 괜찮지만 동시 액세스를 지원하지 않기 때문에 프로덕션 환경에서는 Postgres나 MySQL 같이 보다 강력한 데이터베이스 설루션을 사용하는 편이 좋을 것이다.
Airflow 웹 서버 시작하기
Airflow UI는 Flask 웹 응용 프로그램 형태로 제공된다. 다음 명령을 실행해서 시작할 수 있다.
(venv) $ airflow webserver
이제 브라우저에서 Airflow가 구동된 호스트 포트 8080으로 이동하여 Airflow UI를 방문할 수 있다. (예컨대 http://localhost:8080/admin/)
Airflow상에 DAG 예제 몇 개가 있다. 이 예제들은
dags_folder에 적어도 DAG 정의 파일이 한 개 이상 있어야 작동한다.airflow.cfg의load_examples설정을 변경하여 DAG 예제를 숨길 수 있다.
처음 만들어보는 Airflow DAG
좋다, 모든 게 준비됐다면 코드를 작성해보자. Hello World 작업흐름을 만들어볼 것이다. 이 작업흐름은 “Hello world!” 로그 찍는 일만 한다.
DAG 정의 파일이 AIRFLOW_HOME/dags에 저장되게 dags_folder를 만들어라. 이 디렉터리에 hello_world.py 파일을 만들자.
airflow_home
├── airflow.cfg
├── airflow.db
├── dags <- Your DAGs directory
│ └── hello_world.py <- Your DAG definition file
└── unittests.cfg
dags/hello_world.py에 다음 코드를 추가하자.
from datetime import datetime
from airflow import DAG
from airflow.operators.dummy_operator import DummyOperator
from airflow.operators.python_operator import PythonOperator
def print_hello():
return 'Hello world!'
dag = DAG('hello_world', description='Simple tutorial DAG',
schedule_interval='0 12 * * *',
start_date=datetime(2017, 3, 20), catchup=False)
dummy_operator = DummyOperator(task_id='dummy_task', retries=3, dag=dag)
hello_operator = PythonOperator(task_id='hello_task', python_callable=print_hello, dag=dag)
dummy_operator >> hello_operator
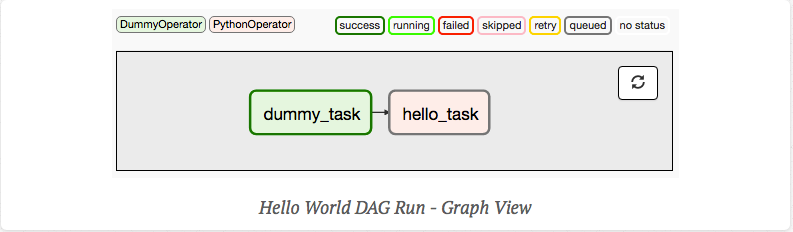
이 파일은 아무 일도 하지 않는 DummyOperator와 태스크가 실행될 때 print_hello 함수를 호출하는 PythonOperator 오퍼레이터 두 개만 가지고 간단한 DAG를 생성한다.
DAG 돌려보기
DAG를 돌리려면 두 번째 터미널을 열고 다음 명령을 실행해서 Airflow 스케줄러를 구동시키자.
$ cd /path/to/my/airflow/workspace
$ export AIRFLOW_HOME=`pwd`/airflow_home
$ source venv/bin/activate
(venv) $ airflow scheduler
스케줄러는 실행시킬 태스크를 이그제큐터로 보낸다. Airflow는 스케줄러에 의해 자동 시작되는 이그제큐터로
SequentialExecutor를 기본적으로 사용한다. 프로덕션 단계에서는CeleryExecutor같이 보다 탄탄한 이그제큐터를 사용해보고 싶을 것이다.
브라우저에서 Airflow UI를 새로고침 하면 Airflow UI에 hello_world DAG가 표시된다.

DAG를 구동시키려면 먼저 작업흐름을 켜고(화살표 1) DAG 동작 버튼(화살표 2)을 클릭하고 마지막으로 그래프 보기(화살표 3)를 클릭해서 실행 진행률을 확인할 수 있다.
두 개의 태스크 모두 성공 상태가 될 때까지 그래프 보기를 새로고침해볼 수 있다. 태스크가 완료되면 hello_task를 클릭하여 들어가서 로그 보기를 클릭해볼 수 있다. 모든 것이 예상대로 작동했다면 로그에 여러 줄이 표시되고 다음 같은 내용이 포함되어있다.
[2017-03-19 13:49:58,789] {base_task_runner.py:95} INFO - Subtask: --------------------------------------------------------------------------------
[2017-03-19 13:49:58,789] {base_task_runner.py:95} INFO - Subtask: Starting attempt 1 of 1
[2017-03-19 13:49:58,789] {base_task_runner.py:95} INFO - Subtask: --------------------------------------------------------------------------------
[2017-03-19 13:49:58,790] {base_task_runner.py:95} INFO - Subtask:
[2017-03-19 13:49:58,800] {base_task_runner.py:95} INFO - Subtask: [2017-03-19 13:49:58,800] {models.py:1342} INFO - Executing <Task(PythonOperator): hello_task> on 2017-03-19 13:49:44.775843
[2017-03-19 13:49:58,818] {base_task_runner.py:95} INFO - Subtask: [2017-03-19 13:49:58,818] {python_operator.py:81} INFO - Done. Returned value was: Hello world!
이 단계의 코드는 GitHub의 해당 커밋을 통해 받을 수 있다.
처음 만들어보는 Airflow 오퍼레이터
나만의 Airflow 오퍼레이터를 만들어보자. 오퍼레이터는 작업흐름의 논리 상 단일 작업을 수행하는 원자 단위이다. 오퍼레이터는 파이썬 클래스(BaseOperator의 하위 클래스)로 작성되며 __init__ 함수를 통해 환경설정이 구성되고 태스크 인스턴스를 실행할 때 execute 메서드를 통해 호출된다.
execute 메서드가 반환하는 값은 return_value 키 아래 Xcom 메시지로 저장된다. 나중에 이 주제를 다룰 것이다.
또한 execute 메서드는 airflow.exceptions 중 하나인 AirflowSkipException을 발생시킬 수 있다. 이 경우 태스크 인스턴스는 건너뛴 상태로 전환된다.
다른 형태의 예외가 발생하면 retries 최대 횟수에 도달할 때까지 태스크 재시도를 한다.
execute 메서드는 여러 번 재시도될 수 있으므로 멱등이어야한다.
plugins/my_operators.py라는 Airflow 플러그인 파일을 작성하여 첫 연산자를 만들어보자. 먼저 airflow_home/plugins 디렉터리를 만든 다음 my_operators.py 파일에 다음 내용을 적고 추가해라.
import logging
from airflow.models import BaseOperator
from airflow.plugins_manager import AirflowPlugin
from airflow.utils.decorators import apply_defaults
log = logging.getLogger(__name__)
class MyFirstOperator(BaseOperator):
@apply_defaults
def __init__(self, my_operator_param, *args, **kwargs):
self.operator_param = my_operator_param
super(MyFirstOperator, self).__init__(*args, **kwargs)
def execute(self, context):
log.info("Hello World!")
log.info('operator_param: %s', self.operator_param)
class MyFirstPlugin(AirflowPlugin):
name = "my_first_plugin"
operators = [MyFirstOperator]
이 파일에서는 MyFirstOperator라는 새 연산자를 정의한다. execute 메서드는 매우 간단하다. “Hello World!”와 매개 변숫값 하나의 로그 남기는 일만 한다. 매개 변수는 __init__ 함수에서 설정한다.
또한 MyFirstPlugin이라는 Airflow 플러그인을 정의하고 있다. airflow_home/plugins 디렉터리에 플러그인을 정의한 파일을 저장함으로써 플러그인이 제공하는 기능과 그것을 정의한 모든 오퍼레이터를 Airflow가 가져다 쓸 수 있다. 오퍼레이터는 from airflow.operators import MyFirstOperator를 써서 불러올 수 있다.
Airflow 플러그인은 문서에서 더 자세한 정보를 얻을 수 있다.
PYTHONPATH가 사용자 정의 모듈을 저장한 디렉터리를 포함하도록 설정됐는지 확인해라.
이제 오퍼레이터를 테스트할 새 DAG를 만들어야 한다. dags/test_operators.py 파일을 만들고 다음 내용으로 채우자.
from datetime import datetime
from airflow import DAG
from airflow.operators.dummy_operator import DummyOperator
from airflow.operators import MyFirstOperator
dag = DAG('my_test_dag', description='Another tutorial DAG',
schedule_interval='0 12 * * *',
start_date=datetime(2017, 3, 20), catchup=False)
dummy_task = DummyOperator(task_id='dummy_task', dag=dag)
operator_task = MyFirstOperator(my_operator_param='This is a test.',
task_id='my_first_operator_task', dag=dag)
dummy_task >> operator_task
DummyOperator 태스크를 이용해서 my_test_dag라는 간단한 DAG를 만들었고 새로 만든 MyFirstOperator를 이용해 또 다른 태스크를 만들었다. DAG 정의 중 my_operator_param에 대한 환경설정 값 전달하는 방법에 유의해라.
이 단계에서 소스 트리는 다음과 같다.
airflow_home
├── airflow.cfg
├── airflow.db
├── dags
│ └── hello_world.py
│ └── test_operators.py <- Second DAG definition file
├── plugins
│ └── my_operators.py <- Your plugin file
└── unittests.cfg
이 단계의 코드는 GitHub의 해당 커밋을 통해 받을 수 있다.
새로운 오퍼레이터를 테스트해보려면 Airflow 웹 서버와 스케줄러를 중지시킨 후(CTRL-C) 재시작해야 한다. 그런 다음 Airflow UI로 돌아가 my_test_dag DAG를 켜고 실행시켜라. my_first_operator_task 로그를 살펴봐라.
Airflow 오퍼레이터 디버깅하기
새로운 오퍼레이터를 재시도해보기 위해 DAG 런을 동작시키고 모든 선행 태스크가 완료될 때까지 기다려야 한다면 디버깅 작업은 금세 지루해질 것이다. 고맙게도 Airflow에는 airflow test 명령이 있다. 이 명령을 사용해서 특정 DAG 런 맥락에서 단일 오퍼레이터를 수동으로 작동시킬 수 있다.
이 명령은 DAG 이름, 태스크 이름 및 특정 DAG 런과 관련된 날짜, 이렇게 3가지 인자를 사용한다.
(venv) $ airflow test my_test_dag my_first_operator_task 2017-03-18T18:00:00.0
이 명령을 사용해서 오퍼레이터 코드를 조정해가며 필요한 만큼 태스크를 여러 번 재시작할 수 있다.
특정 DAG 런에서 태스크를 테스트하는 경우 실패한 태스크 인스턴스 로그에서 필요한 날짜 값을 찾을 수 있다.
IPython으로 Airflow 오퍼레이터 디버깅하기
오퍼레이터 코드 디버깅에 사용할 수 있는 멋진 트릭이 있다. 우선 venv로 IPython을 설치하자.
(venv) $ pip install ipython
그러면 연산자의 execute 메서드 같은 코드 내에 IPython의 embed() 명령을 적을 수 있다.
def execute(self, context):
log.info("Hello World!")
from IPython import embed; embed()
log.info('operator_param: %s', self.operator_param)
이제 airflow test 명령을 다시 실행하면 다음과 같다.
(venv) $ airflow test my_test_dag my_first_operator_task 2017-03-18T18:00:00.0
태스크가 실행되다가 멈추면서 IPython 쉘로 떨어진다. 이 쉘을 통해 코드 내 embed()를 위치시킨 부분을 탐색할 수 있다.
In [1]: context
Out[1]:
{'END_DATE': '2017-03-18',
'conf': <module 'airflow.configuration' from '/path/to/my/airflow/workspace/venv/lib/python3.6/site-packages/airflow/configuration.py'>,
'dag': <DAG: my_test_dag>,
'dag_run': None,
'ds': '2017-03-18',
'ds_nodash': '20170318',
'end_date': '2017-03-18',
'execution_date': datetime.datetime(2017, 3, 18, 18, 0),
'latest_date': '2017-03-18',
'macros': <module 'airflow.macros' from '/path/to/my/airflow/workspace/venv/lib/python3.6/site-packages/airflow/macros/__init__.py'>,
'next_execution_date': datetime.datetime(2017, 3, 19, 12, 0),
'params': {},
'prev_execution_date': datetime.datetime(2017, 3, 18, 12, 0),
'run_id': None,
'tables': None,
'task': <Task(MyFirstOperator): my_first_operator_task>,
'task_instance': <TaskInstance: my_test_dag.my_first_operator_task 2017-03-18 18:00:00 [running]>,
'task_instance_key_str': 'my_test_dag__my_first_operator_task__20170318',
'test_mode': True,
'ti': <TaskInstance: my_test_dag.my_first_operator_task 2017-03-18 18:00:00 [running]>,
'tomorrow_ds': '2017-03-19',
'tomorrow_ds_nodash': '20170319',
'ts': '2017-03-18T18:00:00',
'ts_nodash': '20170318T180000',
'var': {'json': None, 'value': None},
'yesterday_ds': '2017-03-17',
'yesterday_ds_nodash': '20170317'}
In [2]: self.operator_param
Out[2]: 'This is a test.'
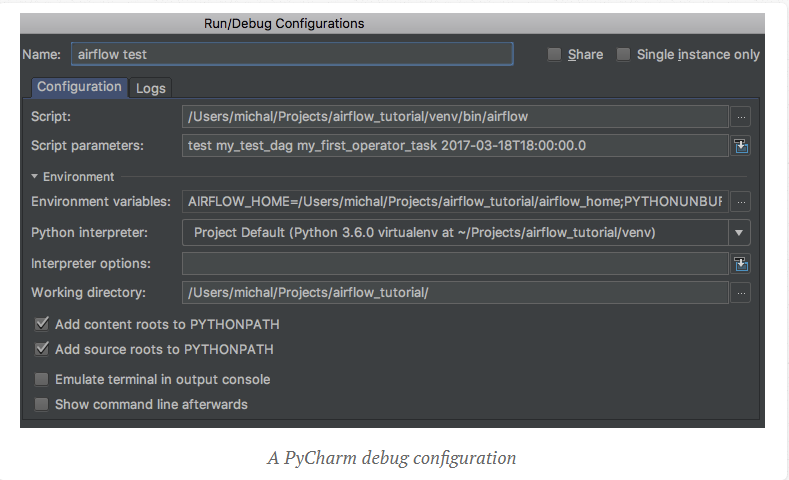
물론 파이썬의 인터랙티브 디버거인 pdb(import pdb; pdb.set_trace()) 나 IPython의 향상된 버전인 ipdb(import ipdb; ipdb.set_trace())를 사용할 수도 있다. 또는 PyCharm 같은 IDE로 중단점을 설정하여 실행 환경설정 기반 airflow test을 사용해볼 수도 있다.
이 단계의 코드는 GitHub의 해당 커밋을 통해 받을 수 있다.
처음 만들어보는 Airflow 센서
Airflow 센서는 일반적으로 다른 시스템에서 장시간 실행 중인 태스크를 모니터링하는 데 사용하는 특별한 유형의 오퍼레이터이다.
센서를 만들려면 BaseSensorOperator 하위 클래스를 정의하고 poke 함수를 오버라이드 한다. poke 함수는 다음 중 하나가 발생할 때까지 poke_interval 초마다 계속해서 호출된다.
-
poke가True를 반환한다.False를 반환하면 다시 호출된다. -
poke가airflow.exceptions의AirflowSkipException을 발생시키면 센서 태스크 인스턴스 상태가 건너뜀으로 설정된다. -
poke가 다른 종류의 예외를 발생시킬 경우retries최대 횟수에 도달할 때까지 재시도된다.
Airflow 코드 베이스에 사전 정의한 센서가 많이 있다.
my_operators.py 파일에 새로운 센서를 만들려면 다음 코드를 추가해라.
from datetime import datetime
from airflow.operators.sensors import BaseSensorOperator
class MyFirstSensor(BaseSensorOperator):
@apply_defaults
def __init__(self, *args, **kwargs):
super(MyFirstSensor, self).__init__(*args, **kwargs)
def poke(self, context):
current_minute = datetime.now().minute
if current_minute % 3 != 0:
log.info("Current minute (%s) not is divisible by 3, sensor will retry.", current_minute)
return False
log.info("Current minute (%s) is divisible by 3, sensor finishing.", current_minute)
return True
현재 시각의 분 단위가 3으로 나뉠 수 있는 숫자가 될 때까지 기다리는 매우 간단한 센서를 만들었다. 해당 사건이 발생하면 센서 조건이 충족되고 종료된다. 이건 인위적인 예이다. 실제 상황에서는 단지 시간이 아니라 예측할 수 없는 무언가를 확인하는 용도로 쓸 수 있다.
플러그인 클래스를 다시 변경해서 새로운 센서를 operator에 추가하여 내보내라.
class MyFirstPlugin(AirflowPlugin):
name = "my_first_plugin"
operators = [MyFirstOperator, MyFirstSensor]
이제 오퍼레이터를 DAG에서 사용할 수 있다.
from datetime import datetime
from airflow import DAG
from airflow.operators.dummy_operator import DummyOperator
from airflow.operators import MyFirstOperator, MyFirstSensor
dag = DAG('my_test_dag', description='Another tutorial DAG',
schedule_interval='0 12 * * *',
start_date=datetime(2017, 3, 20), catchup=False)
dummy_task = DummyOperator(task_id='dummy_task', dag=dag)
sensor_task = MyFirstSensor(task_id='my_sensor_task', poke_interval=30, dag=dag)
operator_task = MyFirstOperator(my_operator_param='This is a test.',
task_id='my_first_operator_task', dag=dag)
dummy_task >> sensor_task >> operator_task
웹 서버 및 스케줄러를 재시작하고 새로운 작업흐름을 이용해보자.
my_sensor_task 태스크의 로그 보기를 누르면 다음과 유사한 내용이 표시된다.
[2017-03-19 14:13:28,719] {base_task_runner.py:95} INFO - Subtask: --------------------------------------------------------------------------------
[2017-03-19 14:13:28,719] {base_task_runner.py:95} INFO - Subtask: Starting attempt 1 of 1
[2017-03-19 14:13:28,720] {base_task_runner.py:95} INFO - Subtask: --------------------------------------------------------------------------------
[2017-03-19 14:13:28,720] {base_task_runner.py:95} INFO - Subtask:
[2017-03-19 14:13:28,728] {base_task_runner.py:95} INFO - Subtask: [2017-03-19 14:13:28,728] {models.py:1342} INFO - Executing <Task(MyFirstSensor): my_sensor_task> on 2017-03-19 14:13:05.651721
[2017-03-19 14:13:28,743] {base_task_runner.py:95} INFO - Subtask: [2017-03-19 14:13:28,743] {my_operators.py:34} INFO - Current minute (13) not is divisible by 3, sensor will retry.
[2017-03-19 14:13:58,747] {base_task_runner.py:95} INFO - Subtask: [2017-03-19 14:13:58,747] {my_operators.py:34} INFO - Current minute (13) not is divisible by 3, sensor will retry.
[2017-03-19 14:14:28,750] {base_task_runner.py:95} INFO - Subtask: [2017-03-19 14:14:28,750] {my_operators.py:34} INFO - Current minute (14) not is divisible by 3, sensor will retry.
[2017-03-19 14:14:58,752] {base_task_runner.py:95} INFO - Subtask: [2017-03-19 14:14:58,752] {my_operators.py:34} INFO - Current minute (14) not is divisible by 3, sensor will retry.
[2017-03-19 14:15:28,756] {base_task_runner.py:95} INFO - Subtask: [2017-03-19 14:15:28,756] {my_operators.py:37} INFO - Current minute (15) is divisible by 3, sensor finishing.
[2017-03-19 14:15:28,757] {base_task_runner.py:95} INFO - Subtask: [2017-03-19 14:15:28,756] {sensors.py:83} INFO - Success criteria met. Exiting.
이 단계의 코드는 GitHub의 해당 커밋을 통해 받을 수 있다.
Xcom으로 오퍼레이터 간 통신하기
대부분의 작업흐름 시나리오에서 후행 태스크는 선행 태스크의 일부 정보를 사용해야 한다. 각 태스크 인스턴스는 다른 프로세스, 또는 다른 머신에서 실행되기 때문에 Airflow는 이 목적으로 Xcom이라는 통신 메커니즘을 제공한다.
각 태스크 인스턴스는 xcom_push 함수를 사용해서 Xcom에 정보를 저장할 수 있으며 다른 태스크 인스턴스는 xcom_pull을 사용해서 해당 정보를 불러올 수 있다. xcoms_pull를 사용하여 전달한 정보는 Airflow 데이터베이스(xcom 테이블)에 피클화시켜 저장하므로 크기가 큰 객체보다는 작은 크기 정보만 저장하는 것이 좋다.
센서를 발전시켜 Xcom에 값을 저장해보자. xcom_push() 함수를 사용하자. 이 함수는 값이 저장될 키와 값 자체를 인자로 취한다.
class MyFirstSensor(BaseSensorOperator):
...
def poke(self, context):
...
log.info("Current minute (%s) is divisible by 3, sensor finishing.", current_minute)
task_instance = context['task_instance']
task_instance.xcom_push('sensors_minute', current_minute)
return True
DAG 센서에 후행하는 오퍼레이터는 Xcom을 검색해서 해당 값을 이용할 수 있다. 값을 저장한 태스크 인스턴스의 태스크 ID와 값을 저장한 key 인자 두 개를 넣어서 xcom_pull() 함수 사용해보자.
class MyFirstOperator(BaseOperator):
...
def execute(self, context):
log.info("Hello World!")
log.info('operator_param: %s', self.operator_param)
task_instance = context['task_instance']
sensors_minute = task_instance.xcom_pull('my_sensor_task', key='sensors_minute')
log.info('Valid minute as determined by sensor: %s', sensors_minute)
최종 버전의 코드는 GitHub의 해당 커밋을 통해 받을 수 있다.
DAG 런을 동작시키고 오퍼레이터 로그를 보면 선행 센서에서 생성한 값을 확인할 수 있다.
Airflow XComs에 대한 상세한 내용은 문서에 볼 수 있다.
Airflow에 대한 간략한 소개가 유용했기를 바란다. 나만의 작업흐름과 데이터 처리 파이프 라인을 재미있게 개발해보자!
Subscribe via RSS